|
人才动态
湾区逐梦 | 徐天添:助“蚁人”入体内治病,让科幻照进现实 【庆祝新中国成立70周年,献礼中科院建院70周年,深圳先进院推出“引领科学风尚 传承科学精神”系列人物报道,树立先进典型,凝聚榜样力量,讲述科技工作者的精彩故事及取得的最新成果,弘扬他们胸怀祖国、服务人民的爱国精神,勇攀高峰、敢为人先的创新精神,追求真理、严谨治学的求实精神,淡泊名利、潜心研究的奉献精神,集智攻关、团结协作的协同精神,甘为人梯、奖掖后学的育人精神。】
像蚂蚁般大小的微型机器人进入人体治病,这似乎是在科幻电影中才会出现的场景,而未来科研人员有望让科幻照进现实。中国科学院深圳先进技术研究院集成所徐天添副研究员多年来潜心研究微型机器人的控制运动,其团队研发的软体薄膜机器人,可在磁场驱动下,在液体中实现多模态运动,并实现特定位置的悬停。 不仅如此,徐天添团队还提出一种新型路径跟随控制算法,针对毫米级磁驱动软体微型机器人,实现了3D任意路径的跟随控制,未来有望用于体内靶向给药。相关研究成果获得了领域内顶级学术会议IEEE智能机器人与系统国际会议(IROS)最佳应用论文奖。
△ 深圳先进院集成所徐天添副研究员 液体中“螺旋泳”前进的柔性机器人 单个直径仅1毫米左右,长度6毫米左右,无需电池或马达,只需外部磁场控制,就能在液体中“游泳”,徐天添团队研发的微型机器人实现了在液体中的多模态运动,包括滚动、爬动、螺旋运动等。 “目前试验用的机器人材料以硅胶为主,并在其中加入钕铁硼颗粒(NdFeB)制成的磁性纳米粒子。这种微型机器人的原始状态是直条状的,在旋转磁场的驱动下,可自动形成螺旋状,并在液体中游动。”徐天添介绍道。
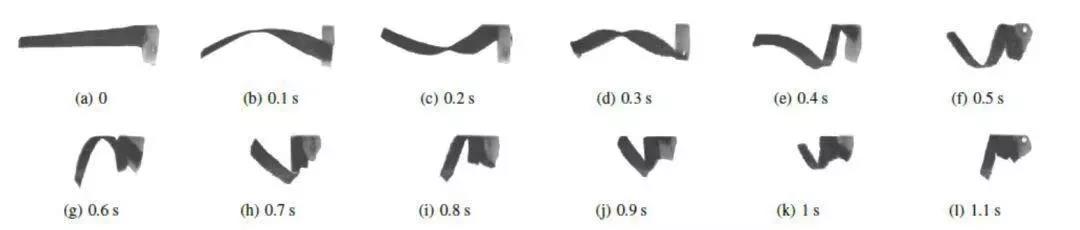
△ 软体薄膜机器人在10mT、6Hz的旋转磁场中的形态变化 为了让游动环境更接近人的血液、眼球液等体液,徐天添团队尝试在不同浓度的硅油模拟运动。结果显示,螺旋形物体在高粘度流体里的运动效率较高。
△ 微型机器人在液体中“螺旋泳”前进 此外,由于软体薄膜微型机器人的材质特殊,可与周围环境发生柔性接触,在生物医学应用中,能够避免给组织器官造成损伤。徐天添表示,未来还会尝试水凝胶等更具有生物相容性的材质。 强大磁场实现自由“悬停” 要想实现体内靶向给药,微型机器人不仅要学会运动,还要能够在指定位置“悬停”。这也是该领域中的研究难题之一。 如何让机器人“听话”?答案依然是磁场。 徐天添团队设计了一套全新的多自由度磁控装置,其主体部分由几个线圈组成。在实验中,将装有液体的烧杯放在线圈中间,装置顶部的摄像头可以实时反映烧杯中微型机器人的轴向和中心位置,并通过算法改变磁场方向,来控制微型机器人。
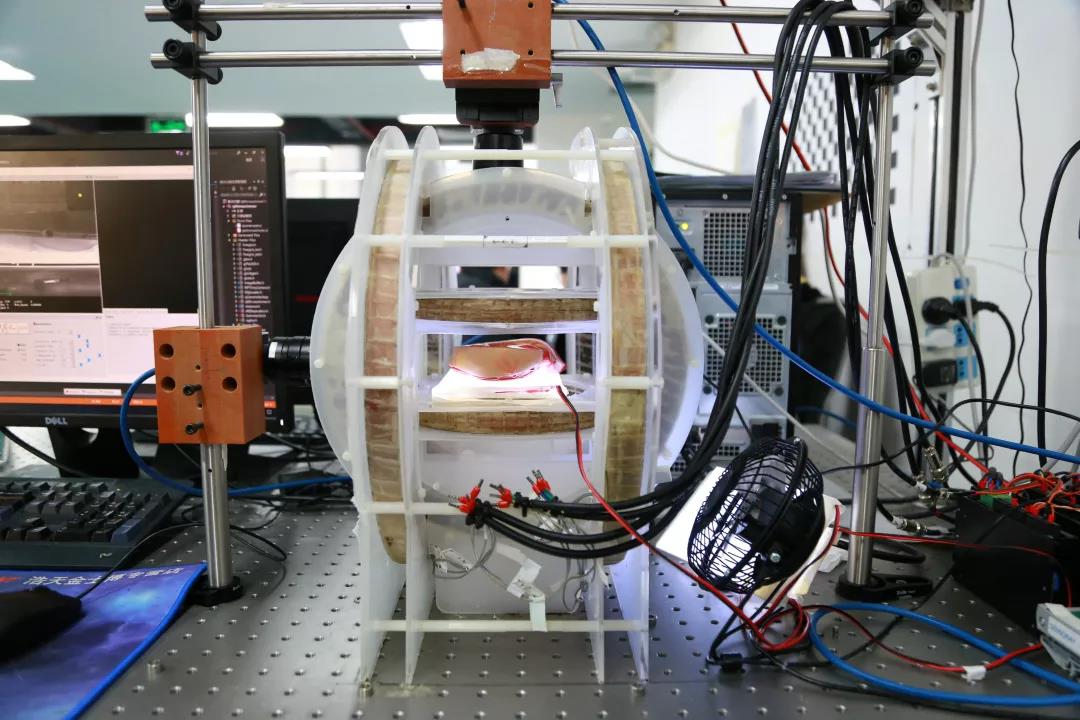
△ 团队设计搭建的微型机器人磁驱动控制平台 通过实验,团队发现微型机器人在外部驱动下,形成的螺距会随磁场频率而缩小,直到螺旋结构塌缩,机器人形成一个类圆柱体的状态并悬停在某一位置。如果改变磁场频率,机器人会再次形成螺旋状并继续运动。 “悬停也是柔性机器人的优势之一,能够在指定位置停住,并进行有针对性的药物释放,这是硬性材料所不具备的功能。”徐天添说道。 成果获顶会最佳应用论文奖 “螺旋运动”“自由悬停”“柔性材质”……今年上半年,徐天添在微型机器人研究中的科研成果已在机器人领域著名学术期刊 IEEE Transactions 系列上连续发表4篇论文。 更值得一提的是,今年11月徐天添团队获得了顶级学术会议IEEE智能机器人与系统国际会议(IROS)最佳应用论文奖,这是中国大陆地区近十年来第一次获得IROS的最佳论文类奖项。
△ 团队获得顶级学术会议IROS最佳应用论文奖 获奖的科研成果是成功实现了3D路径跟随控制,也就是说,团队在微型机器人运动与悬停的基础上,进一步实现了路径规划与导航功能。“路径跟随控制是微型机器人实现应用的最基础和最底层的控制任务之一,团队提出了一种基于向量场的路径跟随控制算法,实现了这一点。” 徐天添介绍,在基于该控制算法设计的交互系统中,通过3D绘图鼠标,绘制任意曲率的3D参考路径,机器人就能按照线路来行动。“这一算法肯定了人在操控中的核心地位,未来如用于临床,医生便能规划机器人的具体路径。”
△ 3D路径跟随控制实验demo 同时,团队还在训练微型机器人的避障能力,避免碰触到危险区域,使三维运动轨迹更加精准。 游动“蚁人”,应用前景广阔 由于微型机器人的尺寸小,可在复杂狭小的空间内轻松作业,因此在靶向药物输送和靶向治疗方向上有非常大的应用潜力。 “比如眼球视神经动脉栓塞,目前无法完全消除栓塞,只能依靠一些消肿药物来减轻症状。未来微型机器人有望直接将药物输送到栓塞的血管内部,或者直接进行精准手术。”徐天添表示,在人们的双手或探头难以接触到的部位,微型机器人将大派用场。
△ 徐天添团队 厚积薄发,成果频出,这位年轻的科研工作者对自己的研究领域充满热爱。2010年,徐天添于巴黎中央理工大学获得工业工程专业硕士学位后,在巴黎第六大学继续攻读博士。在博士期间首次接触微型机器人后,找到了自己的兴趣所在。 2014年,徐天添获得机器人专业博士学位后,在香港中文大学做博士后研究。为了继续从事喜爱的研究方向,她于2016年加入深圳先进院集成所智能仿生中心。她表示,微型机器人的产业化尚有一段距离,而深圳先进院对于基础研究的鼓励给予了较强的自由度与自主性。 “在深圳先进院这个综合型科研平台上,我们有机会做更多跨学科且更深入的研究,相信未来在微型机器人领域会有更多应用级的成果诞生。” |