

Biosensors and Bioelectronics|开发具有原位生物力学传感的小型磁性软机器人导管
小型磁性软机器人导管能够在人体复杂的血管系统中实现远程主动转向导航,并有效减少手术过程中对医生和患者的辐射暴露,因此在微创手术中具有巨大的应用潜力。然而,现有的磁性导管由于缺乏原位生物力学力感知,在微创手术中容易导致组织损伤。
11月24日,中国科学院深圳先进技术研究院徐海峰团队联合中北大学李锐锐副教授、悉尼科技大学林滚滚助理教授,在小型磁控机器人导管的原位力感知策略方面取得重要研究进展。相关成果在期刊Biosensors and Bioelectronics上发表题为“Small-scale magnetic soft robotic catheter for in-situ biomechanical force sensing”的文章。

论文上线截图
在本研究中,研究团队提出了一种适用于小型磁控机器人导管的原位力感知策略。通过在导管远端同轴集成环形永磁体和基于光纤的力传感器,构建了驱动与感知一体化的磁性软导管(直径为2.3mm),实现了远程主动转向导航与高灵敏度生物接触力学感知。
在管腔穿行过程中,磁性软导管通过力学传感器检测与生物组织接触时力的增加来识别障碍物(灵敏度达到0.38nm/mN)。主动转向使导管能够避开障碍物并继续顺利穿过管腔,从而在复杂的管腔系统中安全深入病灶进行精准控制,实现了主动操控与精确力测量的结合。力学反馈显著提高了微创手术的安全性和效率,特别适用于肺结节经支气管微波消融和心房纤颤射频消融等操作。

驱-感一体化的磁控机器人导管在微创手术中的应用。
进一步地,研究团队验证了该小型磁控机器人导管在特定微创手术应用场景中的适用性。报告指出,0.1~0.4N范围内的接触力可显著改善心脏消融手术的效果。当远端磁性导管与组织接触时,法向接触力的可控性对有效进行消融具有显著影响。
在验证实验中,研究团队通过控制远端磁性导管深入并引导至离体猪心脏的目标病灶,通过外部磁场发生器增加磁场强度,在导管与目标病灶组织接触点迅速产生0.2N的初始接触力。
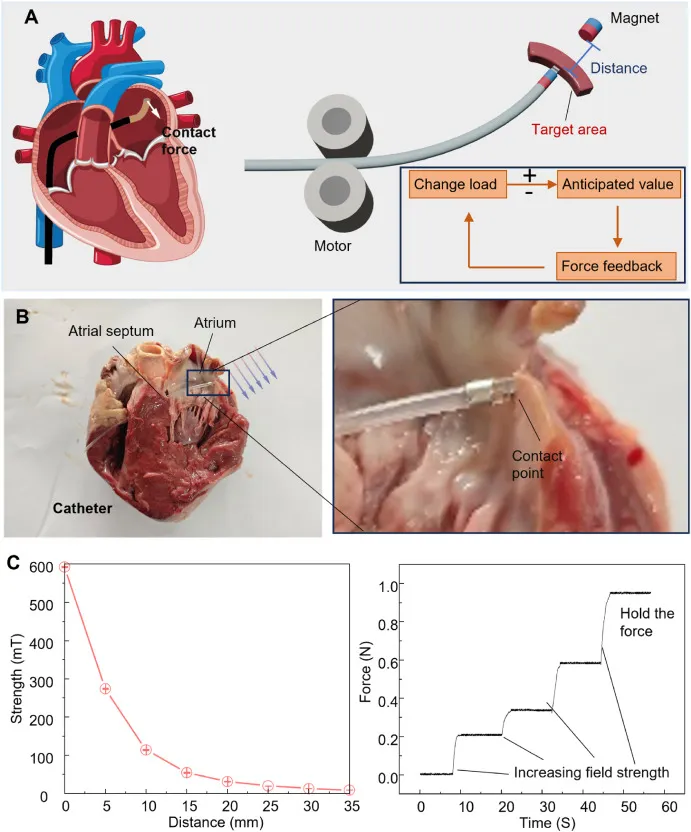
利用反馈回路力控制磁性导管在离体猪心脏中产生可控接触力。
通过固定外部磁体,保持外部磁体与环形磁体之间的距离,从而确保接触力保持稳定。如果力值偏离目标值,磁场强度会动态调整,以恢复并保持所需的力水平。通过进一步提高场强,接触力可调整至0.2~1N。这种精确的接触力控制突出了力感应机制在微创手术中的可行性。
李锐锐副教授为论文第一作者,深圳先进院徐海峰副研究员、刘源副研究员,以及林滚滚助理教授为论文通讯作者。本项目受到了研究工作获得国家自然科学基金项目、深圳市基础研究计划等项目支持。
