灵活精准!深圳先进院提出基于宽度学习的微型机器人智能轨迹追踪方法
近日,中国科学院深圳先进技术研究院集成所智能仿生研究中心的徐升和徐天添研究团队合作,首次将宽度学习算法成功应用于微型机器人轨迹追踪控制中,将数据驱动的思想用于微型机器人控制器设计,由示教训练替换复杂调参,并推导训练算法参数约束以保障稳定性能,极大提升了微型机器人轨迹追踪的准确性及控制器的灵活调整能力。
研究成果以A Learning-Based Stable Servo Control Strategy Using Broad Learning System Applied for Microrobotic Control为题,发表在人工智能领域权威期刊IEEE Transactions on Cybernetics (JCR一区,影响因子:11.448)。徐升副研究员为第一作者,徐天添研究员为通讯作者,深圳先进院为第一单位。
可以在低雷诺数的流体环境作业的螺旋形微型机器人,由于尺度很小,可以轻松在复杂狭小的空间作业,在靶向治疗上有非常大的应用潜力。然而,受系统强非线性、给定轨迹多样性的影响,如何实现微型机器人的精准轨迹追踪的同时又能避免频繁的控制器调整,是十分具有挑战的工作。基于人工智能的学习算法对于解决以上问题有着突出优势。宽度学习算法,自2017年被提出后,主要应用在图像处理、特征辨识、数据分析等领域,其模型相比于传统的深度学习模型,在保证一定精度的同时,具有快速、简洁、支持增量式在线模型更新的突出优点。因此,宽度学习非常适合解决微型机器人复杂轨迹追踪中目标轨迹的多变性,而且其增量式更新方法有望避免控制器频繁调整。
研究团队建立了以宽度神经网络为主体的追踪控制器结构;构造了适用于螺旋形微型机器人轨迹跟踪系统的李雅普诺夫函数,推导出能够保障追踪稳定性的控制器参数约束条件;将多条不同追踪轨迹作为示教数据,开发了基于宽度学习的训练算法,自动解算控制器参数。
通过仿真及实验,研究团队发现,基于宽度学习的训练算法具有训练快速的特点,训练时间只需6秒左右,较深度学习方法具有一定优势;训练后的控制器可以追踪不同形状、速度的轨迹,追踪精度优于课题组前期采用的非线性滑模控制以及同样训练快速的超限学习方法;另外,宽度学习训练算法具有增量式扩展功能,当加入新的训练数据后,可以实现控制器的快速调整,改进追踪效果。本研究成果不仅为微型机器人轨迹追踪控制提供了新理论,而且为机器学习与微型机器人技术的有机融合提供了新思路,有望推动宽度学习在微型机器人的应用。
该系列研究工作得到了国家重点研发计划、国家自然基金、广东省、中科院青促会、深圳市等科技项目资助。
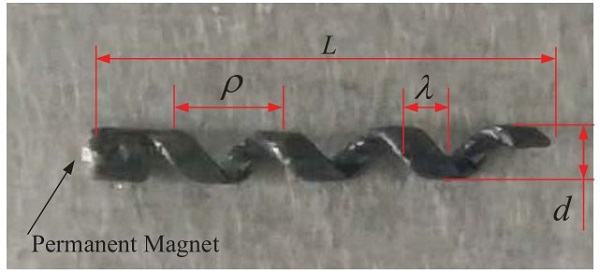
实验所用磁驱动螺旋形微型机器人
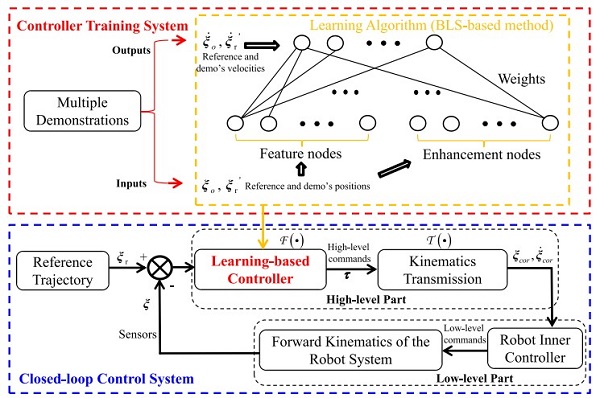
系统整体框图:包括宽度学习训练系统和微型机器人控制系统
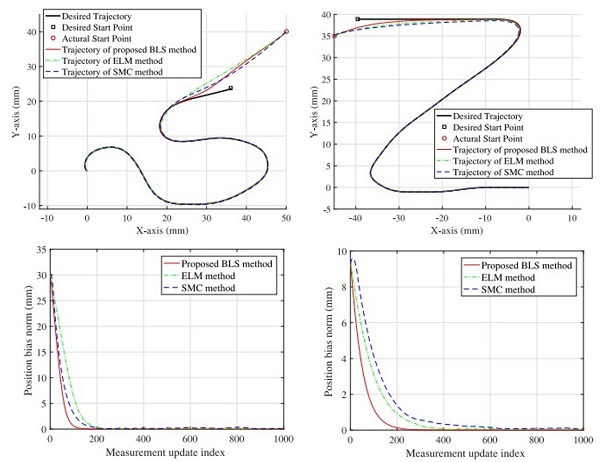
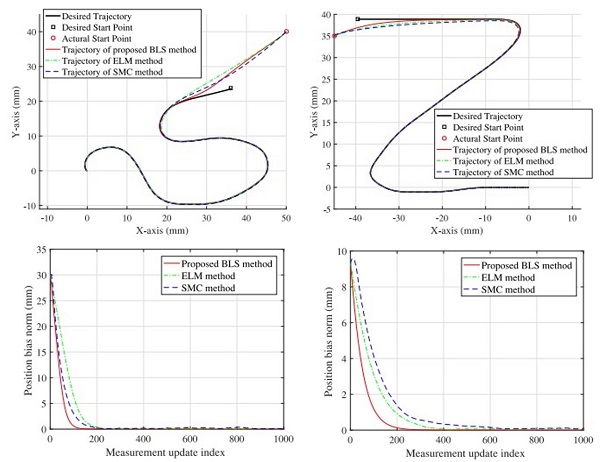
追踪黑色“S”“Z”型给定轨迹,红色线为所提方法,蓝色、绿色线为其他方法(上两图);轨迹追踪的实时位置误差(下两图)。