

IEEE TRO | 柔性水下外骨骼:开启潜水新体验
近日,中国科学院深圳先进技术研究院集成所智能仿生中心团队在水下可穿戴外骨骼领域取得重要进展。团队成功研发了一款柔性潜水助力外骨骼系统PEAKED,它能够协助潜水员完成多种水下动作,包括交替打腿、蛙泳腿以及水下行走,同时大幅降低水下耗气速率,为水下作业效率与安全性带来提升。
研究成果以System Design of A Soft Underwater Exosuit to Reduce Metabolic Cost Across Multiple Aquatic Movements During Diving 为题,发表在机器人领域权威期刊 IEEE Transactions on Robotics。智能仿生中心博士后王向阳和陈春杰研究员为共同第一作者,吴新宇研究员为通讯作者。其它作者中,马跃和孙健铨协助外骨骼系统搭建,杜思达协助实验实施。IEEE Transactions on Robotics 是IEEE旗下机器人与自动化协会的汇刊,是国际机器人领域顶级期刊之一。
论文截图
海洋作业如石油平台维护、管道安装与检查、水下救援和船体清洁等,通常需要潜水员在水下长时间工作。长时间的潜水活动会导致潜水员的代谢成本大幅增加,进而增加减压病等潜水相关疾病的风险。现阶段尚无针对潜水助力的外骨骼系统。
团队依据潜水员水下多模态动作特征,研制了双向套索传动髋关节驱动器,可同时提供双腿屈曲和伸展方向助力,同时能够保证在非助力模式下大腿自由动作不受约束,实现任务的高效性和人员安全性。这一设计不仅提高了潜水员的灵活性,还显著降低了他们在水下作业时的体力消耗。

图1:PEAKED柔性潜水助力外骨骼系统
此外,水下运动因水流扰动,外骨骼易在电缆松弛时进入“不可控状态”,导致助力突兀或延迟。团队提出级联力积分控制算法CFI,通过预测潜水员运动相位,实时生成目标力积分曲线,并结合自适应参数估计补偿扰动。实验显示,相比传统PID控制,CFI控制器助力波动显著降低,响应延迟低于5%动作周期,可实现平滑、稳定的助力输出,显著增强了其在复杂环境中的适应能力。
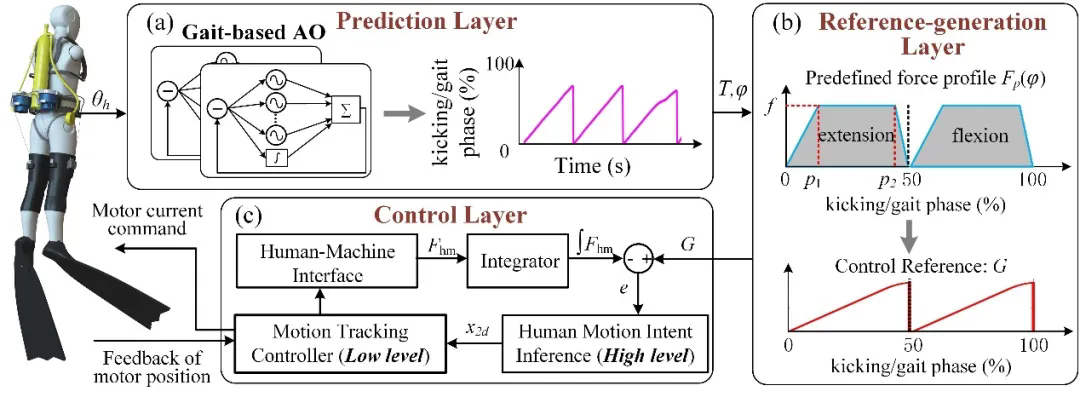
图2: 相位预测-控制参考生成-力积分控制器三层控制框架
研究团队进行了多项实验,9名参与者在不同的运动模式和频率下进行了测试,结果显示,PEAKED针对水下交替打腿能减少潜水员气瓶内空气消耗速率29.77% ± 7.68%,针对蛙泳打腿降低25.70% ± 5.99%,而在水下行走时降幅为18.35% ± 4.53%。这些数据表明,PEAKED在减少潜水员代谢成本方面具有显著效果,结果还显示,在高频率动作下,其助力效能更为明显。
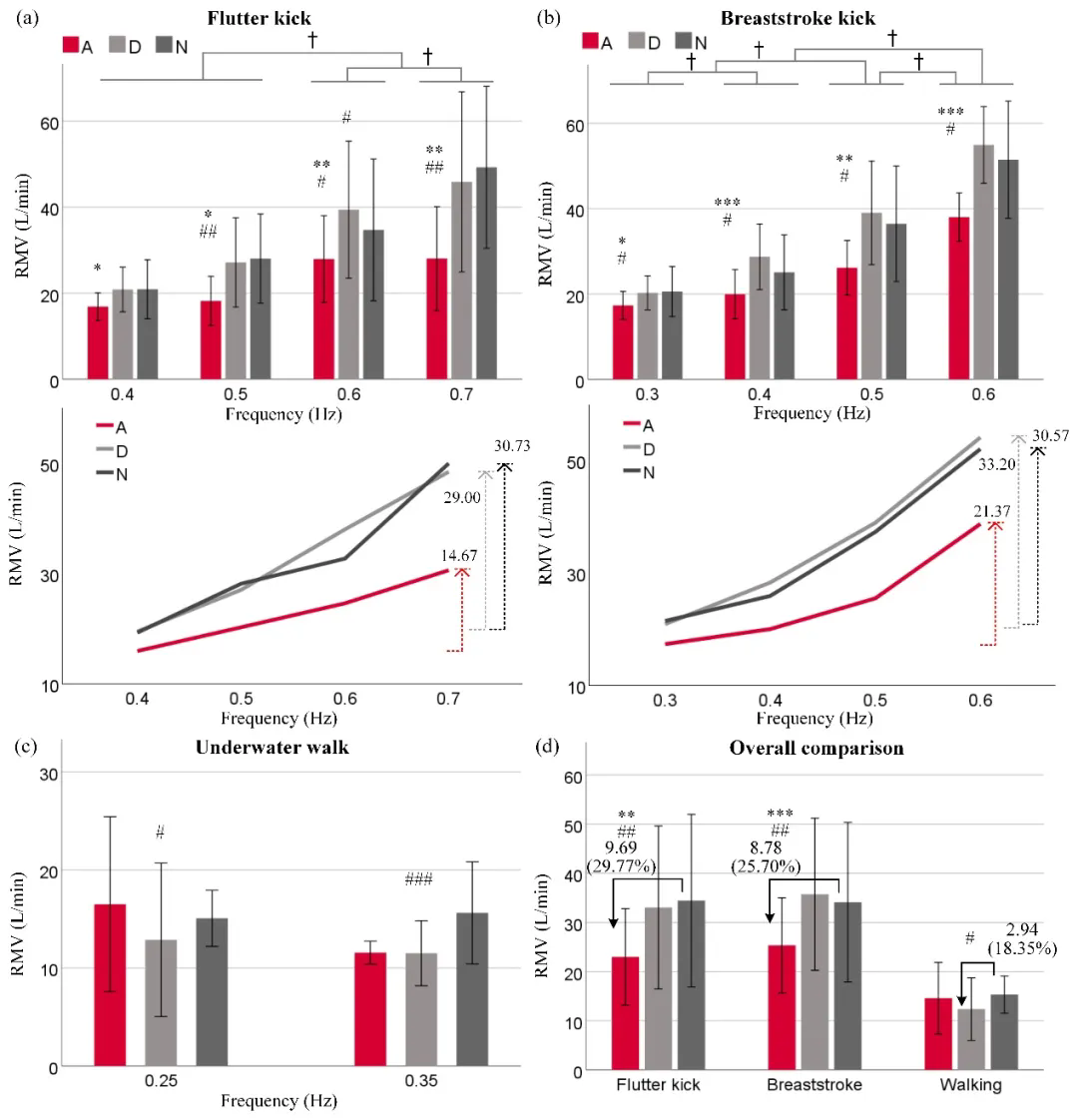
图3 潜水员在三种运动模式和各类动作频率下的耗气速率对比(穿戴助力vs.穿戴不助力vs.不穿戴)

图4 PEAKED针对潜水运动提供助力
实验还评估了外骨骼的运动相位预测精度。研究团队采用基于步态的自适应振荡器方法,能够准确预测潜水员的踢腿相位,其预测误差显著低于传统的基于时间的相位估计方法,可在潜水员动作之前,提前调整辅助力度,从而实现更加自然和高效的助力效果。
PEAKED的出现标志着水下可穿戴机器人技术新的发展。它不仅代表了我国在水下可穿戴机器人技术的重要突破,更为人类探索海洋、开发海洋提供了重要工具。随着这一技术的成熟和完善,更多的潜水员能够借助水下可穿戴机器人,安全、高效的完成水下任务。该研究工作得到了国家自然基金、博士后科学基金、广东省和深圳市等科技项目资助。
