Trends in Biotechnology | 超声“指挥官”下的细菌-细胞生物机器人:深层渗透开启药物递送新篇章
微纳生物机器人具有行为精准可控、功能多样性及优异的生物相容性等特点,是实现精准医疗和复杂生物任务的理想工具。然而,如何有效地控制其运动和功能成为研究的关键。超声在深层生物组织中具有良好的穿透性,能够实现非侵入式、远程的精确操控,对生物体安全性高。因此,超声驱动在微纳生物机器人领域具有重要的应用潜力。
北京时间12月21日,中国科学院深圳先进技术研究院医药所蔡林涛团队和医工所马腾团队联合在国际学术期刊《Trends in Biotechnology》上发表了题为“Programmable Ultrasound-Mediated Swarms Manipulation of Bacteria-Red Blood Cell Microrobots for Tumor-Specific Thrombosis and Robust Photothermal Therapy”的文章。该工作成功开发了一种具有自主缺氧感知和超声响应功能的细菌-细胞生物机器人,通过缺氧靶向联合超声操控,实现肿瘤深层渗透和生成肿瘤特异性血栓,最终实现高效精准治疗。
https://authors.elsevier.com/c/1kIeKc9XEnKgD
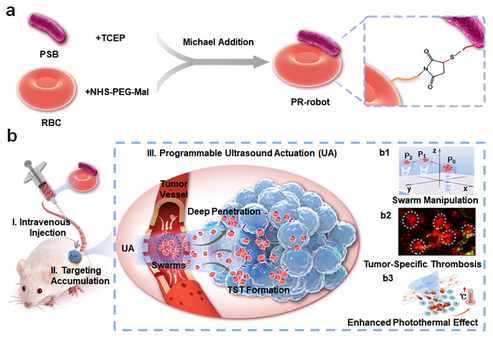
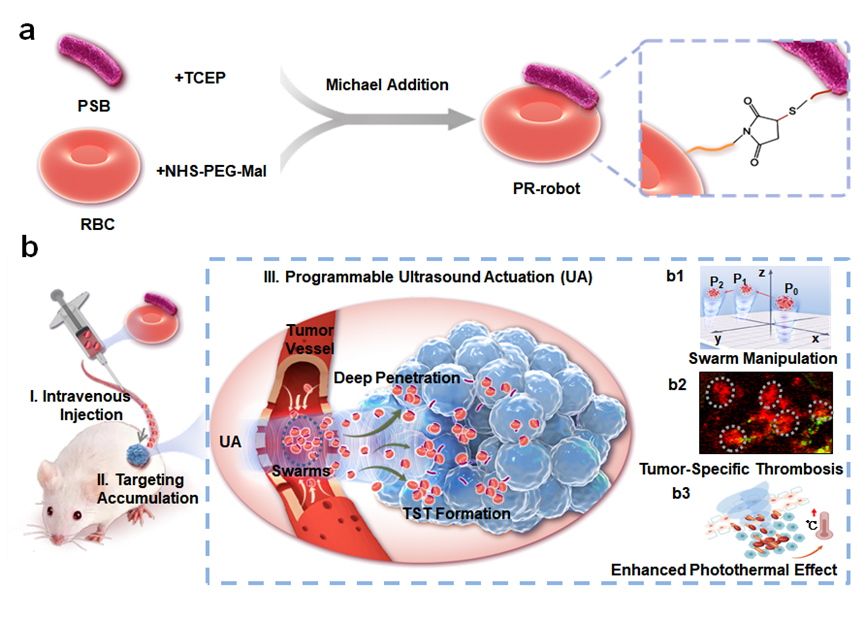
该研究利用光合细菌独特的缺氧感知能力和自身分泌细菌叶绿素的特性,结合红细胞双凹圆盘结构的特点,构建了一种光合细菌-红细胞偶联的生物微型机器人(PR-robot)。该生物机器人具有较长的体内循环时间,并自主靶向肿瘤区域,提高了肿瘤特异性富集效率。同时,红细胞的特殊结构增强了PR-robot的声阻抗,使PR-robot能够以生物集群方式被超声镊精确控制和驱动,甚至穿越生物屏障、深度渗透到肿瘤组织内部。生物群的涌入诱导肿瘤特异性血栓的形成,协同光合细菌增强光热抗肿瘤效果。
超声驱动细菌-红细胞微型生物机器人实现深度渗透用于癌症治疗
研究团队进行了一系列体外和体内实验,以验证生物群的超声可控性和深度渗透的有效性以及生物安全性。首先通过NHS-PEG2000-Mal和- SH的迈克尔加成偶联制备了PR-robots。随后在体外利用程序化超声验证了对这些生物机器人的捕获和驱动能力。研究显示,超声镊能够抓取PR-robots形成生物群集,同时还能精准操控生物群沿着既定路线自主运动,甚至在逆流中前进。进一步研究显示,生物群在超声操控下,能够有序穿越屏障,实现深度渗透。在体内研究中,PR-robots被尾静脉注射后,能够利用细菌的缺氧感知能力和红细胞的保护作用,高效靶向到肿瘤区域。超声镍捕获这些PR-robots,并驱动生物群向肿瘤组织内部渗透。随着PR-robots的涌入,肿瘤组织内部形成大量肿瘤特异性血栓,协同增强光热治疗效果。该微型生物机器人的开发为基于超声驱动控制的药物深层递送和相关疾病的治疗提供了全新的技术手段和设计理念。
中国科学院深圳先进技术研究院蔡林涛研究员、马爱青副教授、马腾研究员、刘兰兰副研究员为通讯作者,硕士研究生冉慧、博士后杨晔、韩伟静副研究员和梁锐晶副研究员为共同第一作者。该研究工作得到了国家自然科学基金委、科技部、广东省科技厅、深圳市科创委等科技项目的资助。