科研团队在轨迹可编程软体驱动器研究取得新进展
近日,中国科学院深圳先进技术研究院生物医学与健康工程研究所微创中心曹崇景副研究员课题组在Advanced Intelligent Systems(影响因子:7.4)发表了题为“A Quad-unit Dielectric Elastomer Actuator for Programmable Two-dimensional Trajectories”的文章,并获选2024年第5期back cover封面文章。深圳先进院博士实习生吴创为共同第一作者,曹崇景副研究员和李晓政博士后为共同通讯作者,深圳先进院为本文的唯一单位。
文章封面报道截图
原文连接:https://doi.org/10.1002/aisy.202300865
多自由度驱动可极大拓展软体驱动器的适用性,但现有的多自由度软体驱动器普遍存在响应速度慢、机电效率低、非线性复杂等难题,致使实际应用受限。
为此,研究团队提出了一种具有输出轨迹高度可编程能力的介电弹性体驱动器设计,基于精准运动学和非线性动力学模型开发了针对输入轨迹的电压控制算法,可实现二维平面下复杂轨迹输出,同时利用介电弹性体快速电致变形响应和谐振驱动特性,实现了快速轨迹切换、高效能输出和机电效率提升。
为了证明所提出轨迹可编程软体驱动器的轨迹输出精准性,研究人员首先选择汉字草书“中华”二字作为指定输出轨迹,利用所提出的电压控制算法反推出驱动器所需电压加载序列,最终实现了驱动器在不到半毫米的田字格内书写草书“中华”二字,跟随精度达98%以上。同时,为了验证轨迹可编程软体驱动器的动态轨迹输出可靠性,研究人员还展示了驱动器在高频率(~50Hz)、大行程下模拟蜂鸟在不同前进速度中的扑翼轨迹。
该工作所设计的轨迹可编程软体驱动器在医疗机器人(如导丝导管精密操控)、仿生机器人等重要领域有着广阔的应用前景。
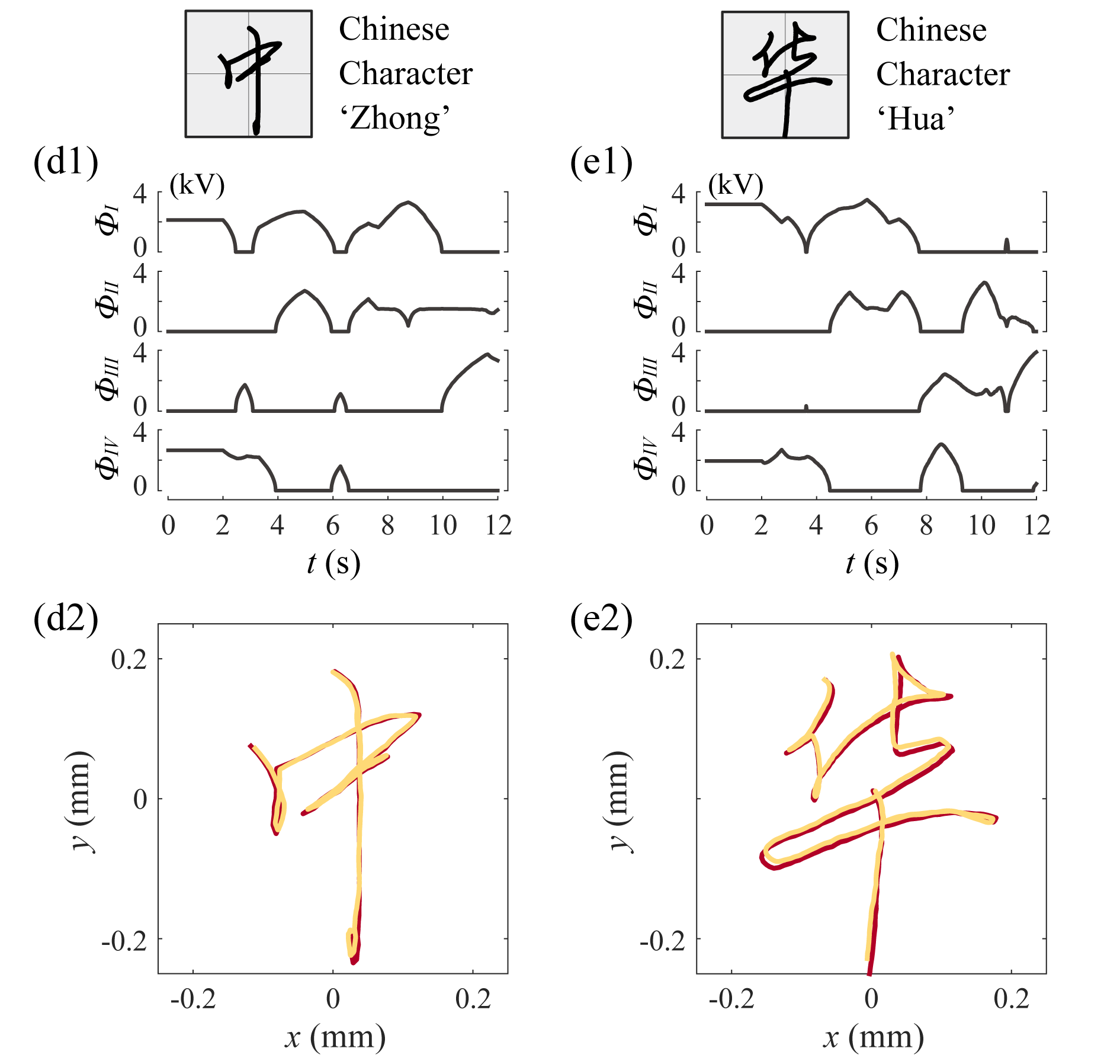
驱动器书写草书“中华”二字展示
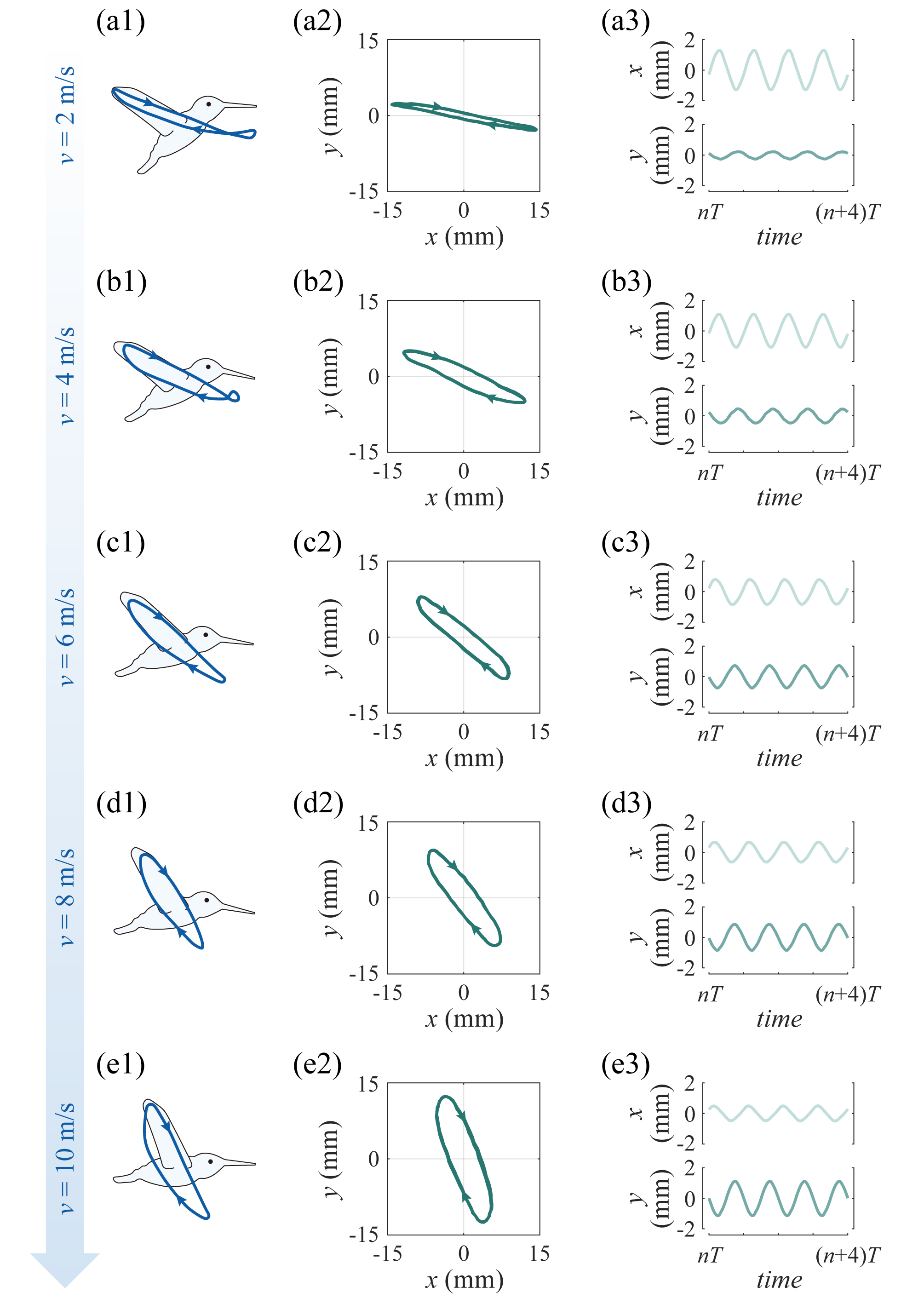
驱动器模拟蜂鸟扑翼轨迹展示